Acelerómetro MPU 6050
Acelerómetro y giroscopio.
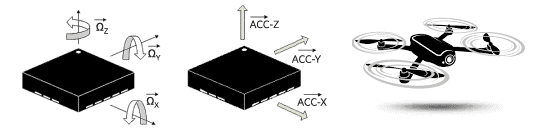
El MPU-6050 es una unidad de medición inercial (IMU) de seis grados de libertad (6DOF) fabricado por Invensense, que combina un acelerómetro de 3 ejes y un giroscopio de 3 ejes.
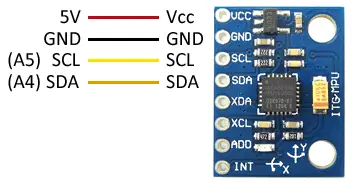
La comunicación puede realizarse tanto por SPI como por bus I2C, por lo que es sencillo obtener los datos medidos. La tensión de alimentación es de bajo voltaje entre 2.4 a 3.6V.
Frecuentemente se encuentran integrados en módulos como el GY-521 que incorporan la electrónica necesaria para conectarla de forma sencilla a un Arduino. En la mayoría de los módulos, esto incluye un regulador de voltaje que permite alimentar directamente a 5V.
Dispone de conversores analógicos digitales (ADC) de 16bits. El rango del acelerómetro puede ser ajustado a ±2g, ±4g, ±8g, y ±16g, el del giroscopio a ±250, ±500, ±1000, and ±2000°/sec.
Es un sensor consume 3.5mA, con todos los sensores y el DMP activados. Dispone de un sensor de temperatura embebido, un reloj de alta precisión e interrupciones programables. También puede conectarse a otros dispositivos I2C como master.
El MPU-6050 incorpora un procesador interno (DMP Digital Motion Processor) que ejecuta complejos algortimos de MotionFusion para combinar las mediciones de los sensores internos, evitando tener que realizar los filtros de forma exterior.
Ejemplos de código
Para realizar la lectura del MPU-6050 usaremos la librería desarrollada por Jeff Rowberg disponible en este enlace. También emplearemos la librería I2Cdev desarrollada por el mismo autor, que mejora la comunicación I2C.
La librería proporciona ejemplos de código, que resulta aconsejable revisar. Los siguientes ejemplos son modificaciones a partir de los disponibles en la librería.
Código del sensor para arduinoMPU6050 y su programación en Arduino
Índice:
- Conceptos generales sobre drones
- Material necesario y montaje de los componentes hardware
- Mando RC y receptor. Programación en Arduino
- → MPU6050 y su programación en Arduino
- Batería LiPo
- Control de estabilidad y PID
- Motores, ESC y su programación en Arduino
- Calibración de hélices y motores
- Software completo y esquema detallado
- Probando el Software completo antes de volar
- Como leer variables de Arduino en Matlab
El sensor MPU6050
IMU o Inertial Mesurment Module es el sensor más importante del drone y sin el cual es imposible mantener el drone en el aire de forma autónoma. Este pequeño sensor proporciona lecturas de velocidad de rotación (giroscopio) y aceleración en los tres ejes de movimiento (acelerómetro). Procesando adecuadamente estas señales podremos obtener las dos variables imprescindibles para volar el drone: la velocidad de rotación de los tres ejes en grados por segundo (º/s) y la inclinación del drone (º). El sensor que yo utilizo es el MPU6050.

//GND - GND
//VCC - VCC
//SDA - Pin A4
//SCL - Pin A5
//INT - Pin 2
#include "I2Cdev.h"
#include "MPU6050_6Axis_MotionApps20.h"
#if I2CDEV_IMPLEMENTATION == I2CDEV_ARDUINO_WIRE
#include "Wire.h"
#endif
// class default I2C address is 0x68
// specific I2C addresses may be passed as a parameter here
// AD0 low = 0x68
// AD0 high = 0x69
MPU6050 mpu;
//MPU6050 mpu(0x69); // <-- use for AD0 high
#define INTERRUPT_PIN 2
#define LED_PIN 13
bool blinkState = false;
// MPU control/status vars
bool dmpReady = false; // set true if DMP init was successful
uint8_t mpuIntStatus; // holds actual interrupt status byte from MPU
uint8_t devStatus; // return status after each device operation (0 = success, !0 = error)
uint16_t packetSize; // expected DMP packet size (default is 42 bytes)
uint16_t fifoCount; // count of all bytes currently in FIFO
uint8_t fifoBuffer[64]; // FIFO storage buffer
Quaternion q; // [w, x, y, z]
VectorInt16 aa; // [x, y, z]
VectorInt16 aaReal; // [x, y, z]
VectorInt16 aaWorld; // [x, y, z]
VectorFloat gravity; // [x, y, z]
float ypr[3]; // [yaw, pitch, roll]
volatile bool mpuInterrupt = false;
void dmpDataReady() {
mpuInterrupt = true;
}
void setup() {
// join I2C bus (I2Cdev library doesn't do this automatically)
#if I2CDEV_IMPLEMENTATION == I2CDEV_ARDUINO_WIRE
Wire.begin();
Wire.setClock(400000); // 400kHz I2C clock. Comment this line if having compilation difficulties
#elif I2CDEV_IMPLEMENTATION == I2CDEV_BUILTIN_FASTWIRE
Fastwire::setup(400, true);
#endif
Serial.begin(9600);
// Iniciar MPU6050
Serial.println(F("Initializing I2C devices..."));
mpu.initialize();
pinMode(INTERRUPT_PIN, INPUT);
// Comprobar conexion
Serial.println(F("Testing device connections..."));
Serial.println(mpu.testConnection() ? F("MPU6050 connection successful") : F("MPU6050 connection failed"));
// Iniciar DMP
Serial.println(F("Initializing DMP..."));
devStatus = mpu.dmpInitialize();
// Valores de calibracion
mpu.setXGyroOffset(220);
mpu.setYGyroOffset(76);
mpu.setZGyroOffset(-85);
mpu.setZAccelOffset(1688);
// Activar DMP
if (devStatus == 0) {
Serial.println(F("Enabling DMP..."));
mpu.setDMPEnabled(true);
// Activar interrupcion
attachInterrupt(digitalPinToInterrupt(INTERRUPT_PIN), dmpDataReady, RISING);
mpuIntStatus = mpu.getIntStatus();
Serial.println(F("DMP ready! Waiting for first interrupt..."));
dmpReady = true;
// get expected DMP packet size for later comparison
packetSize = mpu.dmpGetFIFOPacketSize();
} else {
// ERROR!
// 1 = initial memory load failed
// 2 = DMP configuration updates failed
// (if it's going to break, usually the code will be 1)
Serial.print(F("DMP Initialization failed (code "));
Serial.print(devStatus);
Serial.println(F(")"));
}
}
void loop() {
// Si fallo al iniciar, parar programa
if (!dmpReady) return;
// Ejecutar mientras no hay interrupcion
while (!mpuInterrupt && fifoCount < packetSize) {
// AQUI EL RESTO DEL CODIGO DE TU PROGRRAMA
}
mpuInterrupt = false;
mpuIntStatus = mpu.getIntStatus();
// Obtener datos del FIFO
fifoCount = mpu.getFIFOCount();
// Controlar overflow
if ((mpuIntStatus & 0x10) || fifoCount == 1024) {
mpu.resetFIFO();
Serial.println(F("FIFO overflow!"));
}
else if (mpuIntStatus & 0x02) {
// wait for correct available data length, should be a VERY short wait
while (fifoCount < packetSize) fifoCount = mpu.getFIFOCount();
// read a packet from FIFO
mpu.getFIFOBytes(fifoBuffer, packetSize);
// track FIFO count here in case there is > 1 packet available
// (this lets us immediately read more without waiting for an interrupt)
fifoCount -= packetSize;
// MMostrar Yaw, Pitch, Roll
mpu.dmpGetQuaternion(&q, fifoBuffer);
mpu.dmpGetGravity(&gravity, &q);
mpu.dmpGetYawPitchRoll(ypr, &q, &gravity);
Serial.print("ypr\t");
Serial.print(ypr[0] * 180/M_PI);
Serial.print("\t");
Serial.print(ypr[1] * 180/M_PI);
Serial.print("\t");
Serial.println(ypr[2] * 180/M_PI);
// Mostrar aceleracion
mpu.dmpGetQuaternion(&q, fifoBuffer);
mpu.dmpGetAccel(&aa, fifoBuffer);
mpu.dmpGetGravity(&gravity, &q);
mpu.dmpGetLinearAccel(&aaReal, &aa, &gravity);
Serial.print("areal\t");
Serial.print(aaReal.x);
Serial.print("\t");
Serial.print(aaReal.y);
Serial.print("\t");
Serial.println(aaReal.z);
}
}Video Explicativo
Se ha tomado como referencia el blog de Luis LLamas: https://www.luisllamas.es/arduino-orientacion-imu-mpu-6050/
No hay comentarios:
Publicar un comentario